LOADING...
Overview
Ive recently been thinking about a robotic project surrounding magnetic robots that build collectivley build shapes from user input.
The larger project can be broken down into 3 categories:
-
Pathplanning and algorithems:
- How do the robots build the shape given end goal positions?
- How do robots localize?
-
Networking and Communications:
- How do the robots communicate with one another?
- What serial protocols do they use?
-
Hardware
- How do the robots connect and disconnet from one another?
- What kind of board do they use?
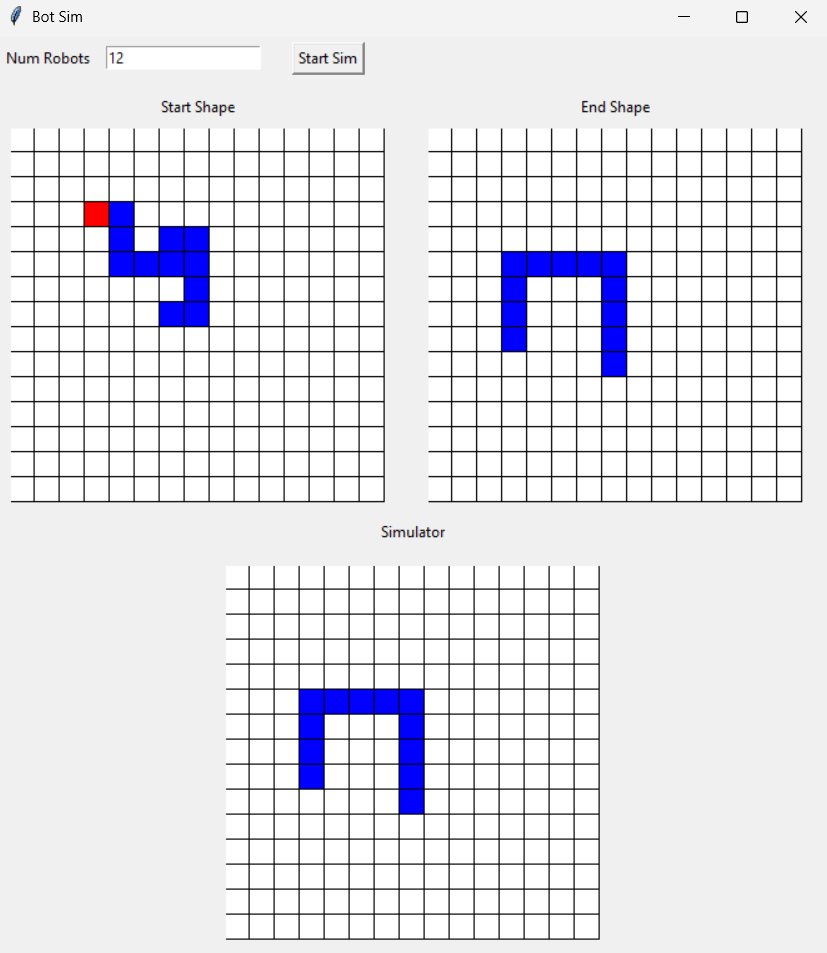
While I wait for the hardware to start building on objective 2 and 3, I can start working on objective one with a simulation. Thus this blog is about category one: Pathplanning
In this project, I use the A* algorithem to calculate the optimal set of movements for each robot to take to build the target shape in the least number of moves. I then created a visual simulation to display the steps of the algorithem.